



So, on what subject(s) am I an authority? My understanding on what being an authority on a subject means is that it is being an expert with recognized credibility on that subject. However, the word “authority” has so many other meanings and it brings to mind the “appeal to authority fallacy”. The “appeal to authority fallacy” refers to appealing to influential people or organizations who may not necessarily be experts, and regardless of the evidence.
In science you don’t really have such authorities, you have experts who often disagree with each other. In the event almost all experts agree on a certain fact that has been thoroughly vetted you can trust that fact with nearly 100% certainty, and that is not appeal to authority but a probability argument. Therefore, I don’t really like the use of the word authority in this context. It is confusing. I would have preferred the question to be “In what subject(s) do you have recognized expertise?”
Robotics
Reflex Control for Obstacle Avoidance and Self Preservation
My PhD thesis was in Robotics, specifically Reflex Control for Obstacle Avoidance and Self Preservation. Therefore, you can say that I am an expert on Reflex Control for Obstacle Avoidance and Self Preservation, Reflex Control (in Robotics) as well as Robotics. My expertise has been recognized through my published research papers, the citing of those papers, my PhD thesis, and my peers including Rodney Brooks.
Rodney Brooks is a former director of the MIT Computer Science and Artificial Intelligence Laboratory, founder of several robotics research companies, and he is arguably the most famous roboticist in the world. In the 1990’s he was featured on the front page in national magazines such as Time Magazine several times. During my internship at the Robotics Lab at Sandia National Laboratory in Albuquerque, New Mexico in 1993, I spoke to Rodney Brooks about my research, and he congratulated me on my research, which he liked.
Briefly, reflex control in Robotics refers to functionally simple, quick, and reliable behaviors that override whatever more complex algorithms or humans (joystick / telerobotics) are commanding in case those algorithms or humans execute dangerous motion. Take for example, a robot moving quickly among multiple objects and the path planning algorithm generates a faulty command that would result in a collision when executed. The reflex control layer would detect the problem (assuming it knows about the objects) and halt the robot before it collided with the object. This would need to happen quickly, in milliseconds, and always in a failsafe way. After the collision has been avoided the system or the human can figure out what went wrong and figure out a new path.
To do this the Reflex controller needs to be embedded with the motion controller, and know the characteristics of the motors, the robot configuration, and mechanical characteristics, such as mass, friction model, inertia, etc., exactly. The result is that when you drive a robot around among multiple objects such as boxes hanging from the ceiling, coat racks, and sombreros, and other robots it will avoid colliding with these objects regardless of input from people or high-level path planning algorithms. It looked like the objects were protected by an invisible force field.
Robot Kinematics
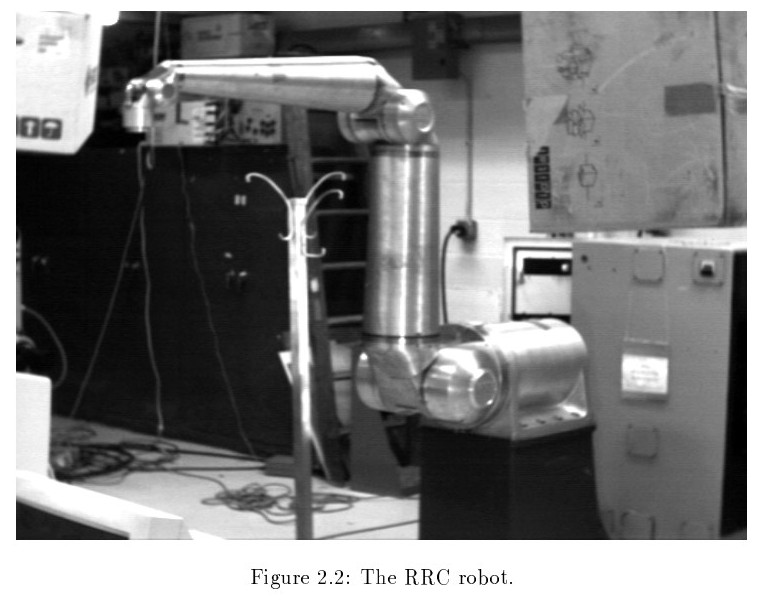
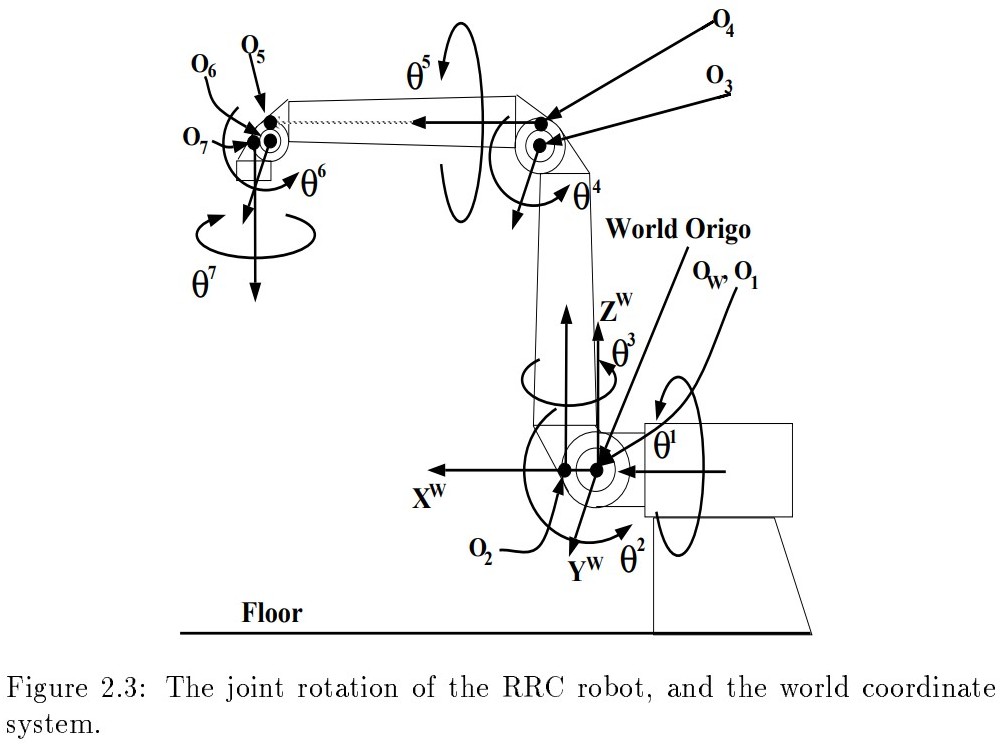
In addition, to “Reflex Control for Obstacle Avoidance and Self Preservation” or “Reflex Control for Robots”, which is very narrow field, I gained expertise in fields of robotics that are a bit wider. One such field is robot kinematics. That includes, for example, calculating the position, speed and acceleration of the tool tip (the end tip) of the robot from the position and motion of the joints of the robot. Or it could be calculating the possible joint angles from the position of the tool tip. The RRC robot was a seven-jointed robot so this could get complicated. I should say that when I worked for ABB Robotics (after my Ph.D) I created the kinematic models for 30+ of ABB Robotics robots. Therefore, I have expertise and recognized credibility in Robot Kinematics as well.
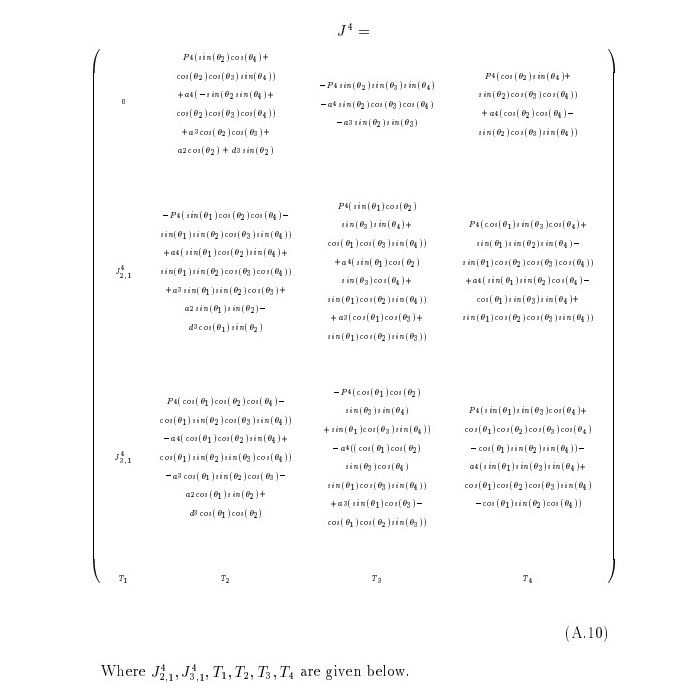
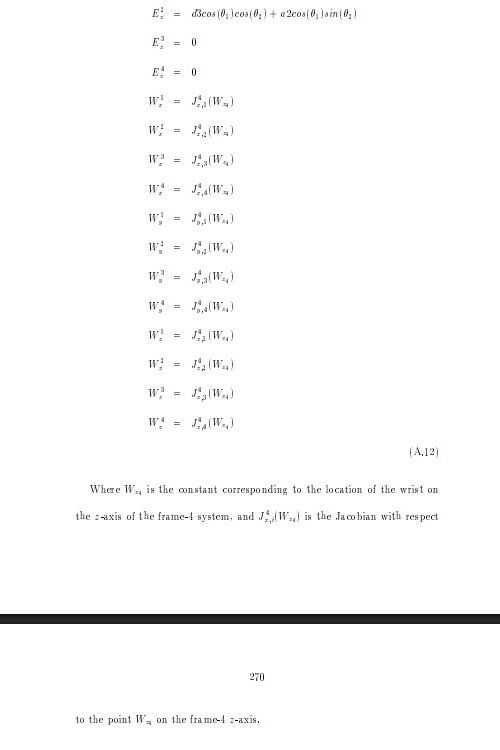
Robot kinematics can get complicated, at least for a seven-jointed robot like the RRC Robot. An example is the Jacobian, which is a matrix that relates joint velocities to end-effector / tool-tip velocities. The Jacobian is crucial for understanding and controlling robot motion, particularly for inverse kinematics and trajectory planning. Below is the Jacobian for the first four joints of the RRC robot. I spent an entire day deriving it. Depending on your eyesight it is difficult to read the scribbles, but it is a bunch of very long, mostly trigonometric equations. Don’t worry about understanding the matrix, it is just to show how complicated robot kinematics can get.


Configuration Space in Robotics
Another subject I gained a lot of expertise in is configuration space or so-called C-space. It is related to robot kinematics. C-space is a mathematical representation of all possible configurations a robot can take. In C-space for a robot arm (like the RRC Robot) the coordinates are the joint angles instead of X, Y and Z. For the seven-jointed RRC robot you have seven joint angles and C-space is thus seven dimensions. C-space is very useful if you succeed in representing obstacles in it. A point might become a curve, or multi-dimensional membrane in C-space, and a ball might become a multi-dimensional banana. I had a lot of fun creating algorithms for creating C-space with obstacles in it.
My Other Expertise
I also have a degree a master’s degree in engineering physics (Teknisk Fysik) from Uppsala University in Sweden. I should say that engineering physics in Uppsala was focused a lot on theoretical physics and modern physics as well as practical applications for physics. Case Western Reserve University later converted this degree to a master’s in electrical engineering. I loved physics and was a good student, but my special interest was the theory of relativity. Even though I had and still have a hard time with the General Theory of relativity and I studied the special theory of relativity way beyond what was required at school, and I read dozens of technical books on the subject. So, this is also sort of an area expertise for me.
Below are some links to topics related to the special theory of relativity on this website:
- The Speed of Light In Vacuum Is a Universal Constant
- Two events may be simultaneous for some but not for others
- GPS uses relativity for accuracy
- Time Dilation Goes Both Ways
- The Pole-Barn Paradox and Solution
I spent at least 30 years working with software as a software engineer / robotics engineer and gained a lot of experience in software development. It was mostly embedded software but also graphical user interfaces, things you can see on a screen, and Networking Software Development. I worked a lot with Visual Studio, a powerful, expandable, and popular integrated development environment (IDE) from Microsoft.
I developed a lot of code using C++ and C#, .Net, WPF, but also other languages and libraries. I started with Visual Studio 97 (in 1997), then Visual Studio 6, Visual Studio .NET 2002, Visual Studio .NET 2003, Visual Studio 2005, Visual Studio 2008, Visual Studio 2010, Visual Studio 2012, Visual Studio 2015, Visual Studio 2017, but I never got around to Visual Studio 2019 and Visual Studio 2022. So, you can say that I am an expert on Visual Studio with C++ and C# and .NET (I am less of an expert on the other languages typically used with Visual Studio).
Later in life I also came to learn a lot about climate change / climate disruption / global warming / the greenhouse effect whatever you call it. I used to be skeptical about climate change, and I thought it might be politicized by the scientific community, but after some interesting red flags I took a deep dive into the subject, and I learned that climate change is very real and caused by us. I was politicized not the scientific community. There is a scientific consensus on the subject for very good reasons. I continued by reading dozens of climate science papers and several dozens of technical and non-technical books on the topic. Therefore, at this point I know more about it than a lot of people. Maybe expert is a strong word, but almost expert.
Least but not last
Being a Leonberger Dog Expert
I know a lot about Leonbergers because my family was lucky enough to live with one for thirteen years. His name was Le Bronco von der Löwenhöhle—but we called him “Bronco” for short. Bronco wasn’t our only dog, but our world wouldn’t have been the same without him. For instance, he once saved the life of our pug by fending off an attack from another dog. He probably saved our Labrador’s life, too, by sniffing out an impending insulin shock before it happened. Then there was the time he scared off a trespasser who’d been terrorizing my wife and other women in the neighborhood.

Bronco is no longer with us, but even in his passing he was distinctive. Leonbergers tend to live less than nine years—but Bronco came very close to reaching his thirteenth birthday. In fact, he received an award for longevity called the “Grey Muzzle Award.” We already knew he was a special dog, but we sent his DNA to two labs for research anyway. I wrote a book about our amazing Bronco and his many amusing adventures and included helpful information on Leonbergers for new owners and interested dog lovers. I also have a Leonberger website.
In the process of writing my book about Bronco and Leonbergers I came to learn a lot about Leonberger dogs, the Leonberger breed standard, their history, health issues, Leonberger organizations, health and care, etc. I became a bit of a Leonberger expert. If you are interested in the book, check it out here or here. You can also get it from Amazon in many other countries, Barnes & Noble, Chapters Indigo and many other bookstores. For more information check here.


























{kind=link}